球杆系统-硬件设计
机械部分的制作主要由现成铝型材和3D打印制作完成。 手上刚好有个坏了的Makeblock的套件, 直接拆掉了重新利用。 整个系统的由一个步进电机进行驱动控制, 该步进电机经由一个减速齿轮将运动传导到横杆上。

figure 1.1 减速齿轮组与电机
大齿轮和横杆之间用一个旋转轴外加一个螺丝打孔固定, 防止滑动。

figure 1.2 横杆与大齿轮的链接
为了测量横杆的角度, 另用联轴器和3d打印固定了一个旋转电位器。这个电位器线性度较好, 属于模拟器件, 直接用ad即可读取, 使用非常方便。
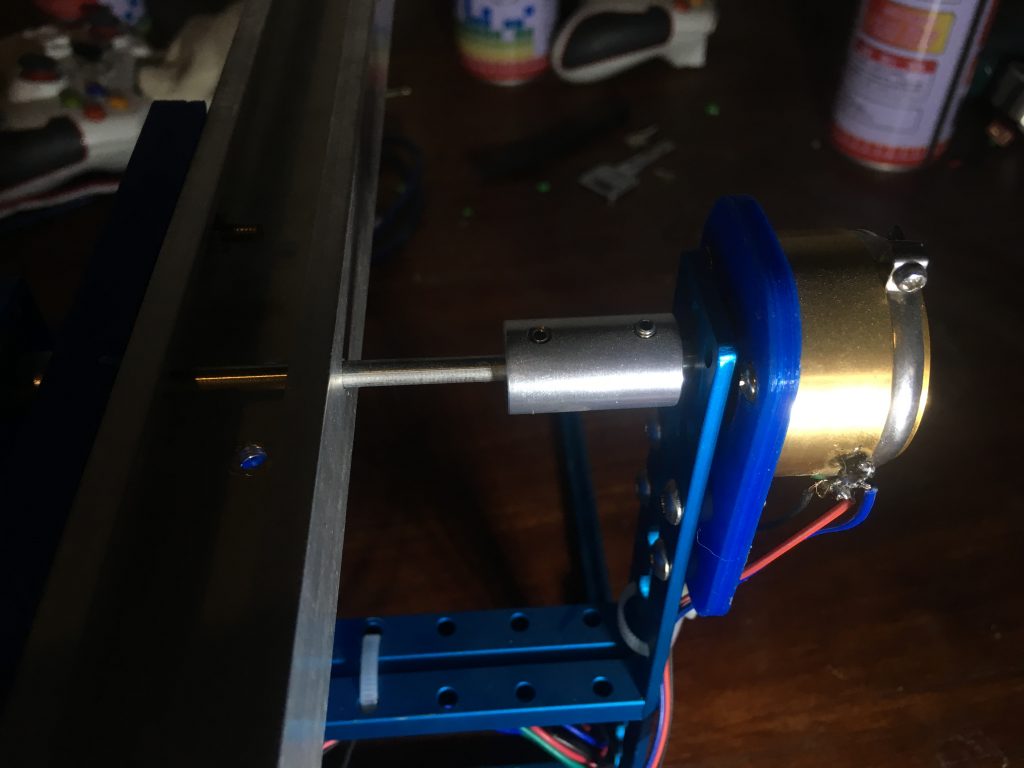
figure 1.3 旋转电位器的安装
为了检测小球的相对位移, 用3d打印的方式固定了一个飞行时间测距传感器。 这个传感器测量误差较小,相比较超声波来说比较稳定,价格也还可以。
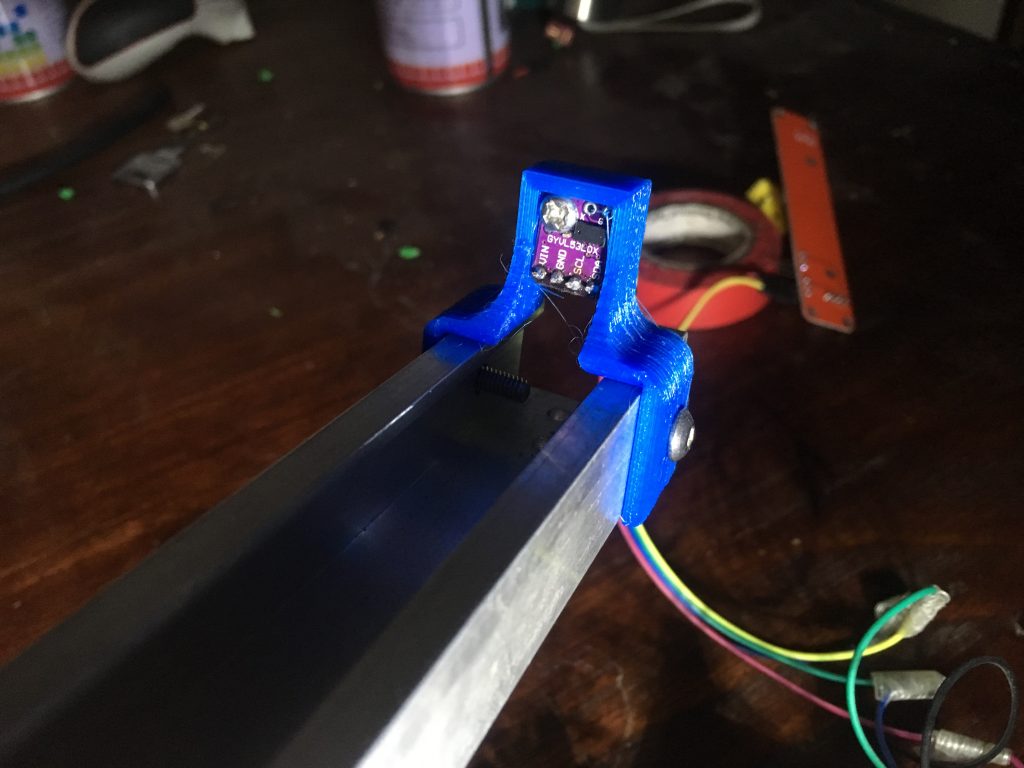
figure 1.4 测距传感器的安装
目前的配置已经能够让系统运动+检测小球位移+检测横杆角度, 只需使用主控板和电机驱动即可。

figure 1.5 主控板与驱动
饶厂长使用的是在df购买的mega2560的主板, 可靠稳定资源多。 驱动使用的是makeblock原装的步进电机驱动板, 另外还有一个普通的有刷直流驱动器(上一个版本做的是有刷直流的,此版本没有使用)。

此外还使用了一个滑动变阻器, 在系统辨识中有用到。用步进而不用有刷直流带编码的原因是, 换向时不可避免的死区造成了抖动, 很难完全消除。 而系统工作时的稳态恰好就需要不停的换向,因此使用有刷直流会增大抖动。 而使用步进就基本不存在这个问题。
说点什么