机械臂写春联–系统设计
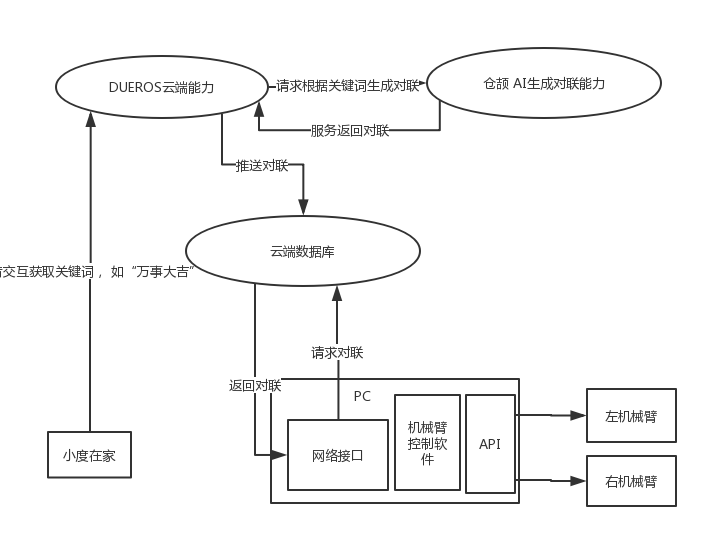
如图所示。 本次的机械臂春联项目是将百度人工智能中的“语音识别技术”, “自动写作技术”和机械臂控制结合完成的。 其中的语音识别技术, 使用的是百度“小度在家”这款产品作为交互终端, 并用dueros提供的开发接口部署了自定义的代码逻辑。

感兴趣的可以访问我司的 https://dueros.baidu.com/open, 申请成为开发者, 将自己的技能部署在小度在家上。
其中的自动AI对联生成部分, 使用了百度的“仓颉”自动写作的能力。 这个“仓颉”的能力远超预期, 除了对联之外, 写诗、 写新闻等不在话下, 在不久的将来, 简单的新闻可能都是机器自动生成的了。
感兴趣的读者也可以访问 http://nlpc.baidu.com/platform/main/article 体验一下, 现在API刚刚开放不久, 值得去挖掘更多的使用场景。
最后的机械臂部分, 使用的是越疆公司的开源机械臂, Dobot magician及其配套导轨。

机械臂的开发并不触及底层的运动学反解与角度控制(这部分厂家已经完成), 只牵扯到了轨迹的规划。 另外, 和机械臂的通信控制协议Dobot公司也已经提供(有各种版本, 包括C++, python, C#, 嵌入式平台等的API以及demo), 我们只需针对功能和轨迹层面进行设计和开发。
除了控制机械臂外, 还不够组成整个系统。 光给出文字, 机械臂是不知道如何写出来的。 这就需要字库作支持, 将文字转换为笔触运动的轨迹。 这部分的内容依赖了github上的两个工程, 分别是https://github.com/makelove/Robot_Arm_Write_Chinese/tree/master/py
以及
https://github.com/skishore/makemeahanzi
第一个项目也是机械臂写汉字, 不过字体看起来有些粗糙, 一开始我使用了他们的字库, 后来找到了第二个项目。 其中有graphic.txt作为字库, 字体相对好很多。 graphics.txt 来自两个开源字体 Arphic PL KaitiM GB 和Arphic PL UKai. 感兴趣的可以去看看。
有了这个字库数据的支持, 整个系统就齐全了。 接下来的任务就是将整个系统集成到一起, 做成一个完整的语音交互机械臂春联系统。