机器守门员-系统设计
一、主传感器方案的选定
刚刚决定要做这个守门员的时候, 基本上的算法思路如下框图所示:
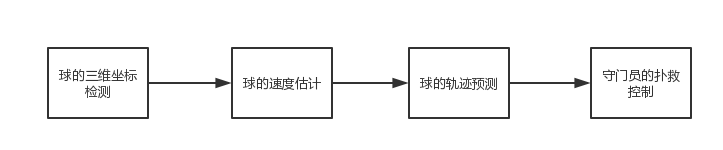
第一个环节, 获取球的三维坐标, 是整个系统最核心最关键的部分, 之后所有的环节都依赖三维坐标作为基本输入。 所以, 如何获取三维坐标, 是系统设计阶段最先要考虑到的问题。
在网上搜索robot goal keeper, 机器守门员这种关键词, 很快找到了一些视频和解决方案, 其中那个挑战梅西的日本视频流传最广。 这些方案无一例外, 基本都是使用高速双目摄像头进行的三维坐标获取。

像这个图片里面, 第一眼很难找到摄像头的位置。 我猜想摄像头应该摆放在左右顶棚的位置, 以固定的角度拍摄场地, 通过双目定位的方式, 计算球的三维坐标。 双目的方案很稳定, 受光线影响比较小, 且帧数较高(普遍在90fps以上), 能够看清极其快速的射门。 但是双目的问题在于, 很依赖场地的搭建。 比如这个图中, 假如没有搭建外圈的支架场地的话, 摄像头如何安装呢? 如何保证摄像头的固定呢?
我的第一反应也是使用双目摄像头作为我们此次的方案, 但是有两个原因让我放弃了:
- 安装的麻烦: 我们开发门将和供应商提供防护网是分开进行的, 也就是说在活动开始前一天, 我们的设备才会放到活动场地中进行调试。 而我们的测试场地是在室内, 室内也不允许我们随意在墙上打眼固定摄像头, 所以使用双目有很多阻碍。
- 方案的同质化: 这么多的方案全都使用了双目, 如果方案从头到尾都照抄他人的, 我们的开发就显得毫无价值了, 还不如就买一台来做活动, 还多快好省。 因此, 不用双目也是对我们自己的挑战。
那么不用双目真的就没办法获取三维定位信息么? 其实不然, 方法还有很多。 其中有一个比较适合我们这个场景的, 就是RGBD相机。

如上图所示, 我们的方案是将RGBD摄像头固定在球门正上方。 这应该是第一次有人用这个方案制作机器人门将。 这个方案的优势和缺陷同样明显, 下面我来详细介绍一下。
从事机器人行业的朋友应该比较熟悉RGBD相机。 RGBD相机有个特别日常生活化的使用场景, 就是体感游戏机。 玩过xbox360的朋友们是否还记得有个体感控制器, 叫做kinect。 有了这个kinect, 就可以在家和朋友一起打网球, 做运动, 切水果等等。 这个kinect就是RGBD相机。

那为什么不叫体感摄像头, 叫RGBD? 这就和他的成像有关系了。 稍微了解一些摄像机成像原理的朋友就知道, 数字相机拍摄的照片中的每个像素都有RGB三个分量, 分别是红色绿色蓝色的强度, 这三原色可以合成各种不同的颜色。 数字照片的数据中, 每个像素都包含RGB三个通道的分量。 所谓RGBD的相机, 就是除了RGB三个分量, 还有深度这一项信息。 也就是每个像素点离成像空间的物理距离。
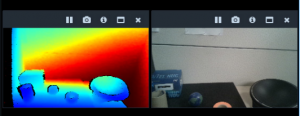
上图就是RGBD相机拍摄出来的图像。 左图是深度图(D), 右图是普通的RGB图像。 根据深度图的深度信息和rgb图像, 我们就可以获取可视范围内所有点的颜色和空间位置了。
如果你没明白这两段, 没关系, 只需要知道RGBD相机能感知物体的空间信息就好了。
这样的RGBD方案有什么优略吗? 当然, 对比双目方案来说, 劣势有:
- 帧率低: 目前最新的realsense相机(RGBD的一种)只能达到60fps的帧率, 速度极快的球有可能看不清, 影响计算和扑救。
- 受光线影响较大: RGBD的深度信息目前还是主要依赖主动投射的方式获取深度信息的, 因此如果暴露在自然强光下效果会变差甚至失灵。 如果光线太弱也会影响, 对光线的鲁棒性比双目较差。
同样的, 他的优势也很明显:
- 安装调试极其方便: 只需安装在门框上, 标定出一个俯视角度即可使用。 而双目需要分别标定两个摄像头的外参, 在经常换场地的情况下非常麻烦。 而RGBD的方案只要确定俯仰角就可以了。
- 三维计算容易:算法上由于有了RGBD信息, 计算球的位置的算法相对双目运算量更小, 更简单。
最终我们选用了intel今年最新的RGBD相机, realsense D415。 于是, 带着优势与劣势, 与广大方案不同的新方案也在犹疑中诞生了。
二、结构的设计
软件的开发, 就像球场上的战术制定, 穿插跑位, 节奏调度, 软件让整个系统有机顺畅的运转起来。 硬件的开发, 就像每个队员的身体训练, 力量、速度、耐力、爆发, 硬件让球员有了执行战术的基础。 这个机器守门员也是一样, 有软件和硬件设计两部分的内容。 而且硬件应该先于软件设计完成, 才能给软件算法提供基本的测试环境和条件。
硬件设计不像软件, 可以快速迭代重构, 硬件的修改周期较长, 这就决定了硬件设计需要慎重, 要深思熟虑, 充分考虑需求。 设计不能过度, 远超实际需求的话会提高成本; 设计也不能不够, 达不到指标或刚好卡在指标处的话, 就会给软件留下噩梦般的调试体验。
一句话, 合理制定需求, 设计上给需求留一定裕量。
所以, 需求到底是什么, 我们得把“机器守门员”这样一句抽象的语言, 变成非常具体的设计指标, 才能变成我们的需求, 作为设计的输入。 从以下四个方面去考虑:
1. 球门的大小: 有人会觉得奇怪, 球门的大小为什么会成为障碍? 一开始我也没get到,直到发现了问题才为时晚矣。 球门越大, 意味着守门员越高, 转动惯量越大, 重力下坠力臂越大, 对电机的功率要求越大。 本次使用的球门尺寸为3m*2m, 就是宽为3m高2m, 守门员高度也就是1.95m左右。
2. 可防的球速: 我们的感知系统最远能感知的距离也就是7-8m左右。 普通人的球速大概可以达到72km/h, 也就是20m/s, 在7-8m的距离射门, 球的飞行时间大约在0.35s-0.4s。 那么我们设计为了够防守住普通人的射门, 从球飞起开始算起, 0.35s之内守门员必须扑救到位, 0.35s包含了感知和预测落点的时间和扑救动作的执行时间, 如果给两边各留一半时间的话, 那么扑救时间就是0.175s。 这就是一个设计输入了。 因此在电机和减速机的选择上, 有了这一数值作为参考需求。
3. 成本控制:不考虑成本的话, 很多指标都可以达到。 比如说用巨大功率的电机啦, 使用一体设计啦, 使用定制舵机啦, 都是非常耗费成本的方案, 因此电机使用, 结构设计都得经济实用才行。
4. 可搬运性: 这是成本之外最麻烦的一个点了, 由于设备放在调试间开发, 活动时要拿出去放在活动场所供使用, 使用完毕还要再拉回来, 这就要求设计上得考虑容易拆装, 得模块化, 不然搬运起来头疼。

如图所示, 转轴前后各有一个轴承座, 能够防止电机轴受力, 提高系统的使用寿命。 同样, 使用箍管的方式, 也能够有效减轻守门员的重量, 减轻电机的负担。
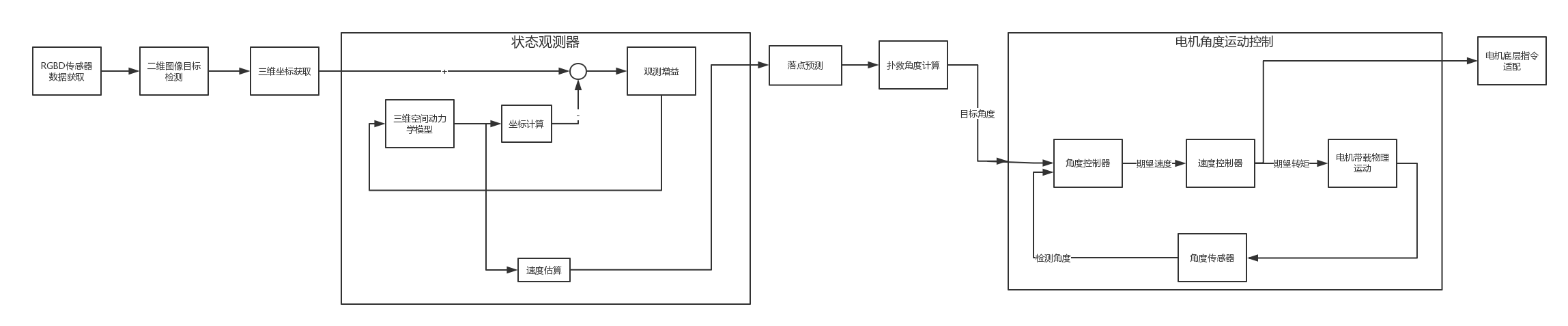
三、架构详细设计
说点什么